Copying
It is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (v3 or later) and so on.
This is distributed in the hope that it will be useful, but without any warranty, contains mistakes of all kinds (however, unintentional) and all that.
The exact terms are in COPYING
Though this is a free (in rms sense) program, PalmOS is not, and never will be. I don't know whether they want to free the system or not, however they can't do this on their own, because PalmOS was based on a system that belonged to another firm. I distinctly realize that, therefore I write nauta for fun and self-education.
Main Features
System requirements: PalmOS 3.5 and higher.
- Supported protocols:
- NMEA:
- messages GGA, GLL, GSA, GSV, RMC, VTG, ZDA.
- sensor types AG, GP, HC, LA, LC, OM, TR.
- TSIP (0x41, 0x42, 0x43, 0x46, 0x4A, 0x56, 0x6D, 0x83, 0x84 messages)
- SiRF
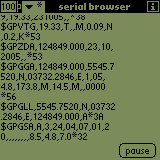
- There are also two simple "protocols", HEXA and ASCII: the data will not be parsed, just shown at Scroll display and optionally logged.
- NMEA:
- log and view all data from any sensor with a serial interface. Bluetooth, infrared, RS-232 ports are supported; multiple ports can be open at the same time. SDIO, MMC ports are not supported (but the memory cards are supported).
- scalable database of (NMEA) sensor and message types (almost useless).
- triple language support: Latin, Russian and English versions are available.
- differential corrections can be translated from any port to others.
Distribution Contents
The archive contains the nauta 4?15l (first patch level) (October17) which includes the following files:
- PalmOS files
in bin/iii and bin/v directories (language-independent), bin/iii/lat/ and bin/v/lat/ (Latin), bin/iii/ru/ bin/v/ru/ (Russian, KOI8-R), bin/iii/ruwin/ and bin/v/ruwin/ (Russian, CP1251), bin/iii/en/ and bin/v/en/ (English). in bin/iii the files for PalmOS 3.5 are placed: procedures working on external memory and Bluetooth are removed from them. in bin/v there are files for PalmOS 5: they contain all those functions. files from different directories should not be installed on a single device, though the both classes of binaries will work on any PalmOS from 3.5 to 5.x (or even later).nauta.prc nauta for Palm (the main application) tiedb.pdb table of transitions on keypresses asciiparser.prc ASCII parser coreform.prc programme core settings gpsform.prc satellites and measurements status hexparser.prc HEXA parser logform.prc tracks with comments are logged to a file menuform.prc menu frmn.pdb instructions for menuform.prc navform.prc position and velocity nmeaparser.prc NMEA parser prefsform.prc preferences rmlog.prc application to quickly delete nauta's logs rtcmparser.prc simple parser for DGPS corrections scrollform.prc scrolling screen sirfparser.prc SiRF parser skyform.prc the same data as in gpsform.prc in graphs. trackform.prc the ways passed with receivers statform.prc current and medium position, root-mean-squares. syncform.prc Palm time and UTC difference; clock correction sysform.prc Palm information tsiparser.prc TSIP parser - Descriptions in doc/ directory
- Sources in src/ directory
Installation
- Remove the previous version of the program if installed
- Install the selected version of the files. nauta.prc is necessary, the other files are not. but if nothing else is installed, nothing is shown. all files combinations are considered to be equally stable (but remember the distribution conditions). if menuform.prc don't find frmn.pdb or nauta.prc don't find tiedb.pdb, default files are generated automatically.
- The data conversion utilities are not present in binary form. they can be built where
GNU make, gcc, bash and sed
are (e.g. under *nix, including cygwin). just say
$ make utils
then the utilities should appear in bin/utils/.
Modules description
nauta.prc
The main application. he has no forms besides auxiliary. he controls all the rest. he reads in tiedb.pdb his table of transitions between forms on keypresses. he writes his events in /var/lib/nauta/log. they can be read after conversion with db2txt program. in released versions, those logs are not so verbose, but you will have to delete them from time to time. I use FileZ and my rmlog.
The entering from sources data are passed to parsers (..parser.prc). the parser converts these data in messages, then the messages are fetched to the current form (..form.prc). now this latter form displays the data in accordance to her will. certain parsers can be feeders. such a parser produces from it's source differential corrections and sends them to sources.
A pipe includes a source, a feeder, a parser and a database whither the data are written. the data can be displayed or not, written or not. all this can be customized at preferences form (prefsform.prc). All pipes, no pipes and single pipe can also be quickly selected. this is performed with a popup list in the upper left corner. multiple simultaneous channels are supported. now trackform.prc is the only one that distinguishes messages from different sources. multiple channels can be useful if data from several sources need to be logged at the same time. of course, the hardware must admit this.
asciiparser.prc
This converts all the data to text messages. they can be seen at the Scroll form.
coreform.prc
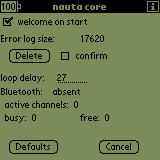
Nauta core: settings and state.
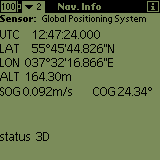
gpsform.prc
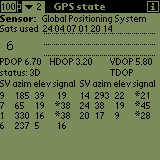
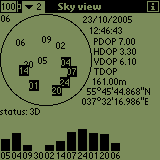
Measurements state, number and list of satellites in use, and in which directions they are seen, and dilusions of precision.
hexparser.prc
The only difference from asciiparser.prc is that this transforms the data to hexadecimal form.
logform.prc

Current positions with user comments are written into a database. in the upper part the current measurement and free memory are shown. then the write interval in seconds is shown and can be modified. after that there are the comments list. the comments can be selected, deleted, corrected and added. you can select them from the list in the usual for PalmOS way or with >Up< and >Down< keys, as well as via graffitying the first letter of the comment. in the lower part the database in which the measurements and comments are written is defined.
If an external memory card was used, copy the logged file to a less portable machine. in the file you can see lines like these: